6.4 リファレンスポイントのHU値のチェック
目的
リファレンスポイント近傍のHU値が極端に小さな、もしくは大きな値になっていないかを確認する。
リファレンスポイントのまわりのある半径を持つ球に含まれるの平均を返す関数を実装する。
実装ではリファレンスポイントをアイソセンターとしている。
必要な情報
プランで用いられている画像、
プランのアイソセンター、
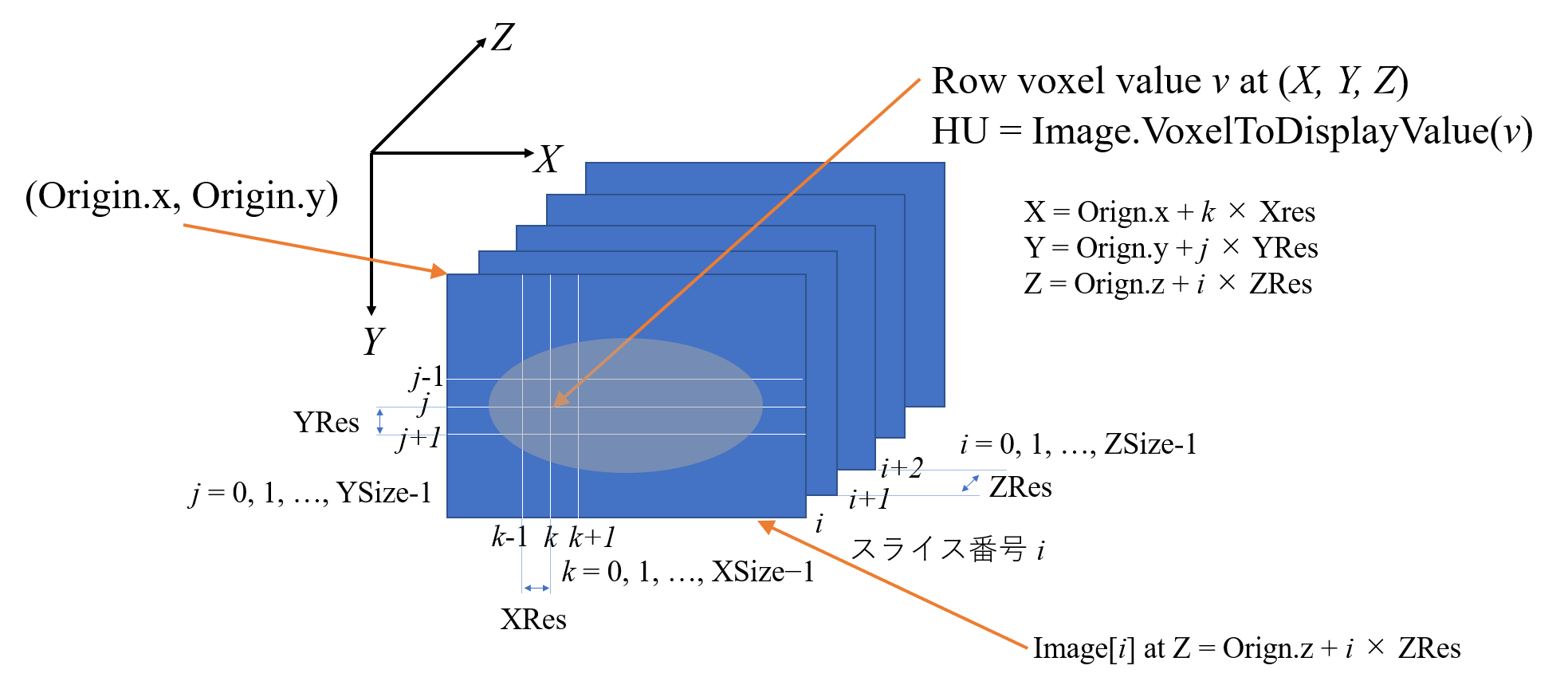
画像座標の原点、グリッドサイズ、グリッド幅、
VoxelのHU値
与えられている引数
PlanSetupクラスのインスタンスplanSetup、
許容するHU値の下限値HuLowerThreshold、
許容するHU値の上限値HuUpperThreshold
必要な情報へのアクセス方法
- 現在開かれているプラン(
planSetup)で用いられている画像の取得
| var image = planSetup.StructureSet.Image;
|
- アイソセンター(一番目のビームのアイソセンター)の取得
| var var isocenter = planSetup.Beams.First().IsocenterPosition;
|
- アイソセンターの座標の取得(1次元配列に格納)
| var isocenterPosition = new double[] { isocenter.x, isocenter.y, isocenter.z };
|
- 画像座標の原点(
gridOrigin)、グリッド幅(mm)(gridReses)、グリッドサイズ(gridSizes)の取得(それぞれ1次元配列に格納)
| var gridOrigin = new double[] { image.Origin.x, image.Origin.y, image.Origin.z };
var gridReses = new double[] { image.XRes, image.YRes, image.ZRes };
var gridSizes = new int[] { image.XSize, image.YSize, image.ZSize };
|
- スライス
iの画像の取得
| image.GetVoxels(i, zImage);
|
2次元配列zImageに画素値が格納される。1次元目がx方向、2次元目がy方向であることに注意。
- 画素値をHU値に変換
| var value = image.VoxelToDisplayValue(zImage[k, j]);
|
必要な情報
- 画像IDの表示
| MessageBox.Show(string.Format("Image ID: {0}", image.Id));
|
- 画像の グリッド情報
| MessageBox.Show(string.Format("Origin (原点): ({0:0}, {1:0}, {2:0})", image.Origin.x, image.Origin.y, image.Origin.z));
MessageBox.Show(string.Format("Resolution (グリッド幅): ({0:0}, {1:0}, {2:0})", image.XRes, image.YRes, image.ZRes));
MessageBox.Show(string.Format("Size (グリッドサイズ): ({0:0}, {1:0}, {2:0})", image.XSize, image.YSize, image.ZSize));
|
- アイソセンタ情報
| MessageBox.Show(string.Format("Isocenter: ({0:0}, {1:0}, {2:0})", isocenter.x, isocenter.y, isocenter.z));
int k0 = (int)Math.Floor((isocenter.x - image.Origin.x) / image.XRes);
int j0 = (int)Math.Floor((isocenter.y - image.Origin.y) / image.YRes);
int i0 = (int)Math.Floor((isocenter.z - image.Origin.z) / image.ZRes);
MessageBox.Show(string.Format("Isocenterのグリッド位置: ({0:0}, {1:0}, {2:0}", k0, j0, i0));
|
- アイソセンタの画素値、HU値
| var z0Image = new int[image.XSize, image.YSize];
image.GetVoxels(i0, z0Image);
var rawVoxelValue0 = z0Image[k0, j0];
MessageBox.Show(string.Format("IsocenterのRaw Voxel値: ({0}", rawVoxelValue0));
var huValue0 =image.VoxelToDisplayValue(rawVoxelValue0);
MessageBox.Show(string.Format("IsocenterのHU値: ({0}", huValue0));
|
実装
- アイソセンタを中心とした球内のHU値の平均を計算し、許容範囲かどうかを判定し、結果を返す関数
| public static string CheckIsocenterHu(PlanSetup planSetup, double HuLowerThreshold, double HuUpperThreshold)
{
|
- アイソセンタ座標の取得
| var isocenter = planSetup.Beams.First().IsocenterPosition;
var isocenterPosition = new double[] { isocenter.x, isocenter.y, isocenter.z };
|
- 画像、及びその原点、グリッド幅、グリッド数の取得
| var image = planSetup.StructureSet.Image;
var gridOrigin = new double[] { image.Origin.x, image.Origin.y, image.Origin.z };
var gridReses = new double[] { image.XRes, image.YRes, image.ZRes };
var gridSizes = new int[] { image.XSize, image.YSize, image.ZSize };
|
- 調べる範囲を決める球の半径(mm)の指定
| // radius of the sphere ROI in mm
double radius = 5;
|
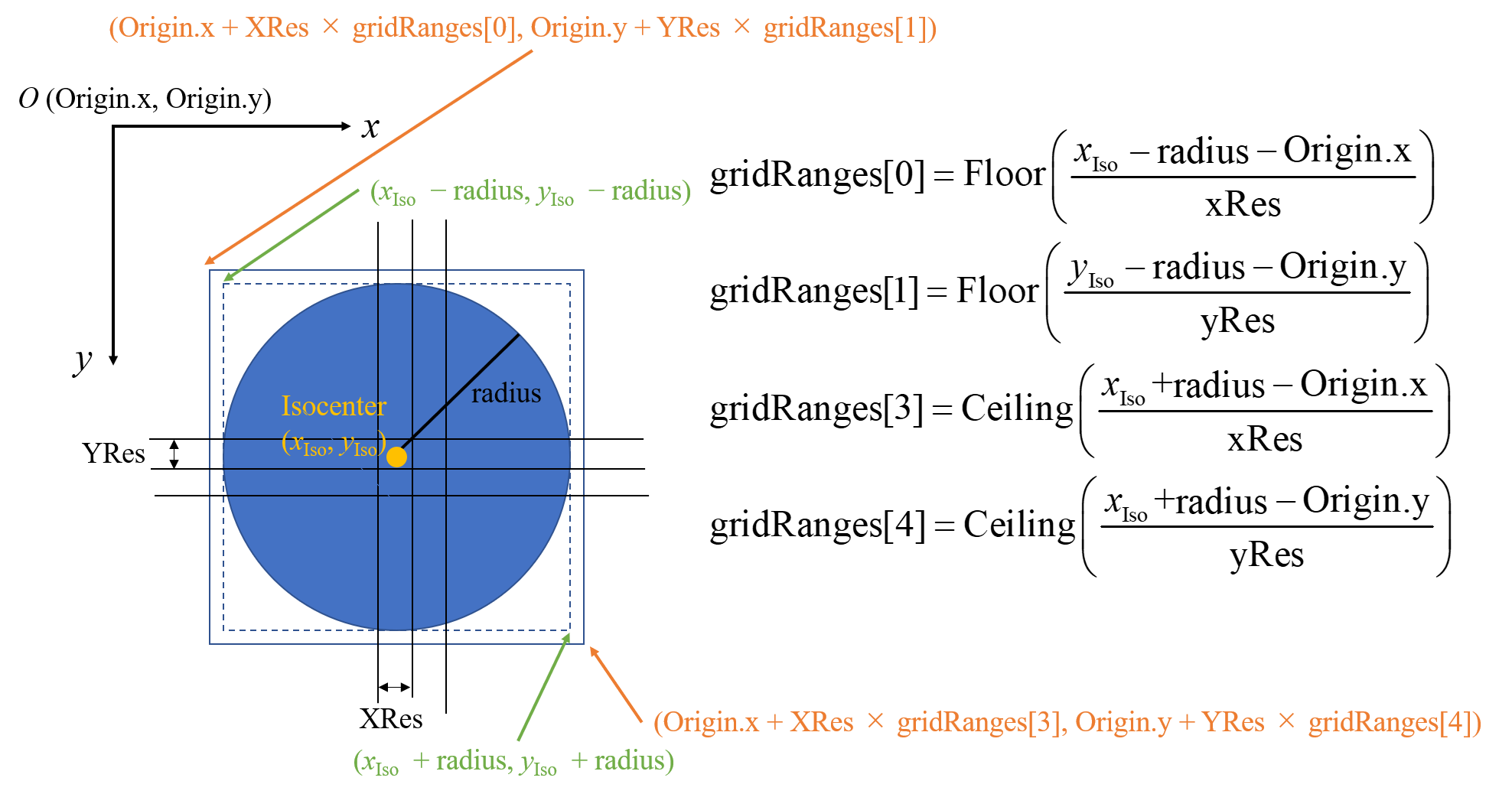
- 調べる範囲の球を含むvoxel範囲の取得
| var gridRanges = GetGridRangesForSphere(radius, isocenterPosition, gridOrigin, gridReses, gridSizes);
|
- 直方体内のvoxelを全て回るループ
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16 | int numVoxels = 0;
double sum = 0;
var zImage = new int[image.XSize, image.YSize];
// Z
for (int i = gridRanges[2]; i <= gridRanges[5]; i++)
{
double z = image.Origin.z + i * image.ZRes;
image.GetVoxels(i, zImage);
// Y
for (int j = gridRanges[1]; j <= gridRanges[4]; j++)
{
double y = image.Origin.y + j * image.YRes;
// X
for (int k = gridRanges[0]; k <= gridRanges[3]; k++)
{
double x = image.Origin.x + k * image.XRes;
|
- voxelが球内に含まれるかを判定し、球外だと次のvoxelに移る。
| double r = Math.Sqrt(Math.Pow(isocenterPosition[0] - x, 2) + Math.Pow(isocenterPosition[1] - y, 2) + Math.Pow(isocenterPosition[2] - z, 2));
if (r > radius)
{
continue;
}
|
- 球内のvoxelの値をHU値に変換し、voxelsに格納し、HU値の和を求めるための変数sumに加える。
| var value = image.VoxelToDisplayValue(zImage[k, j]);
sum += value;
numVoxels += 1;
}
}
}
|
- 球内のvoxel値の平均を計算し、結果をresultに書き出し。
1
2
3
4
5
6
7
8
9
10
11
12
13
14 | var average = sum / numVoxels;
//MessageBox.Show(String.Format("numVoxels, sum, average: {0}, {1}, {2:0.0}", numVoxels, sum, average));
string result = String.Format("Averaged HU within the {0} mm sphere at Isocenter: {1:0.0}", radius, average);
if (HuLowerThreshold < average && average < HuUpperThreshold)
{
return MakeFormatText(true, "Check Isocenter HU", "");
}
else
{
return MakeFormatText(false, "Check Isocenter HU", result);
}
}
|
- 半径 radiusの球をぎりぎり含む直方体のVoxel範囲を返す補助関数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35 | public static int[] GetGridRangesForSphere(double radius, double[] center, double[] gridOrigin, double[] gridReses, int[] gridSizes)
{
var xGridRanges = GetGridRange1d(radius, center[0], gridOrigin[0], gridReses[0], gridSizes[0]);
var yGridRanges = GetGridRange1d(radius, center[1], gridOrigin[1], gridReses[1], gridSizes[1]);
var zGridRanges = GetGridRange1d(radius, center[2], gridOrigin[2], gridReses[2], gridSizes[2]);
var gridRanges = new int[6];
gridRanges[0] = xGridRanges[0];
gridRanges[1] = yGridRanges[0];
gridRanges[2] = zGridRanges[0];
gridRanges[3] = xGridRanges[1];
gridRanges[4] = yGridRanges[1];
gridRanges[5] = zGridRanges[1];
return gridRanges;
}
public static int[] GetGridRange1d(double radius, double center, double origin, double res, int size)
{
var gridRanges = new int[2];
gridRanges[0] = (int)Math.Floor(((center - radius) - origin) / res);
if (gridRanges[0] < 0)
{
gridRanges[0] = 0;
}
gridRanges[1] = (int)Math.Ceiling(((center + radius) - origin) / res);
if (gridRanges[1] >= size)
{
gridRanges[1] = size-1;
}
return gridRanges;
}
|